L’environnement ROS est-il adapté à la Commande Distribuée et la Simulation de systèmes de production robotisés ?
Projet pédagogique ENSEEIHT (Projet Long 2017 de l’option CDISC) : L’environnement ROS est-il adapté à la Commande Distribuée et la Simulation de systèmes de production robotisés ?
Comme l’année dernière, le pôle AIP-PRIMECA toulousain a accueilli de février à mi mars un Projet Long de la spécialité « Génie Electrique et Automatique » (option CDISC) de l’école d’ingénieurs ENSEEIHT (http://www.enseeiht.fr/fr/formation/formation-ingenieur/gea-genie-electrique-et-automatique.html).
Six étudiants de la promotion de 3ème année ont travaillé durant 6 semaines à temps plein, sur un projet long proposé par Sandra U. Ngueveu, enseignante-chercheuse à l’ENSEEIHT et Cyril Briand, enseignant-chercheur à l’Université Toulouse III – Paul Sabatier. Il s’agissait d’évaluer dans quelle mesure l’environnement ROS peut être utilisé pour réaliser une commande distribuée d’une cellule flexible de production.
 Le middleware ROS (Robot Operating System) est une plateforme de développement logiciel qui fournit des bibliothèques et des outils pour aider les développeurs de logiciels à créer des applications robotiques (http://www.ros.org/). Pouvant fonctionner sur un ou plusieurs ordinateurs, cet environnement procure de nombreuses fonctionnalités telles que l’abstraction du matériel, le contrôle des périphériques de bas niveau, la transmission de messages entre les processus et la gestion des packages installés.
Le middleware ROS (Robot Operating System) est une plateforme de développement logiciel qui fournit des bibliothèques et des outils pour aider les développeurs de logiciels à créer des applications robotiques (http://www.ros.org/). Pouvant fonctionner sur un ou plusieurs ordinateurs, cet environnement procure de nombreuses fonctionnalités telles que l’abstraction du matériel, le contrôle des périphériques de bas niveau, la transmission de messages entre les processus et la gestion des packages installés.
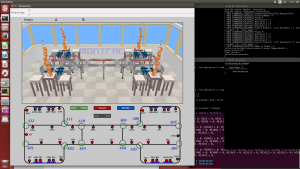
Les étudiants ont mis en évidence que ROS, lorsqu’il est associé à l’environnement de simulation VREP (http://www.coppeliarobotics.com/), fournit la plupart des services indispensables à la mise en œuvre haut niveau d’un plan de production. Des services de bas niveau peuvent être implémentés au sein de nœuds ROS dialoguant directement avec les automates (ou la simulation VREP) et ayant accès à l’ensemble des capteurs et actionneurs du système de production. Ces nœuds fournissent des services de plus haut niveau accessibles par d’autres module ROS chargés de mettre en œuvre un plan de production en respectant les gammes de production.
Cette architecture de commande a été validée sur la cellule flexible de production de l’AIP-PRIMECA et un scénario de production a été validé en simulation. La commande de haut niveau a été modélisée par Réseaux de Petri colorés. Cette expérience a permis de prouver l’intérêt de ROS pour le développement rapide de la supervision de systèmes de production. Une limitation est la charge de calcul nécessaire à la simulation de systèmes complexes, celle-ci pouvant nécessiter de distribuer les nœuds de simulation VREP sur plusieurs calculateurs. Une autre limitation est l’impossibilité de réaliser une commande en temps réel (ROS ne permettant pas de garantir le respect de contraintes de temps). Pour pallier ce problème, ROS peut néanmoins être interfacé avec d’autres environnements nativement temps réel.
Ce projet engendrera à terme la création d’un Bureau d’Etude pour les formations utilisatrices de l’AIP-PRIMECA qui permettra d’initier les étudiants à la commande haut niveau de systèmes de production à partir de la rentrée 2018.
Membres de l’équipe projet :
- Aurélie Quintana
- J.-B Blanc-Rouchossé
- Claire Delage
- Céline Tomé
- Maxime Maurin
- Enrique Maldonado